

Блог Олега Сарычева
Колёсоногий робот-трансформер ползает и карабкается
Блог Олега Сарычева
Дата: 24.8. 2018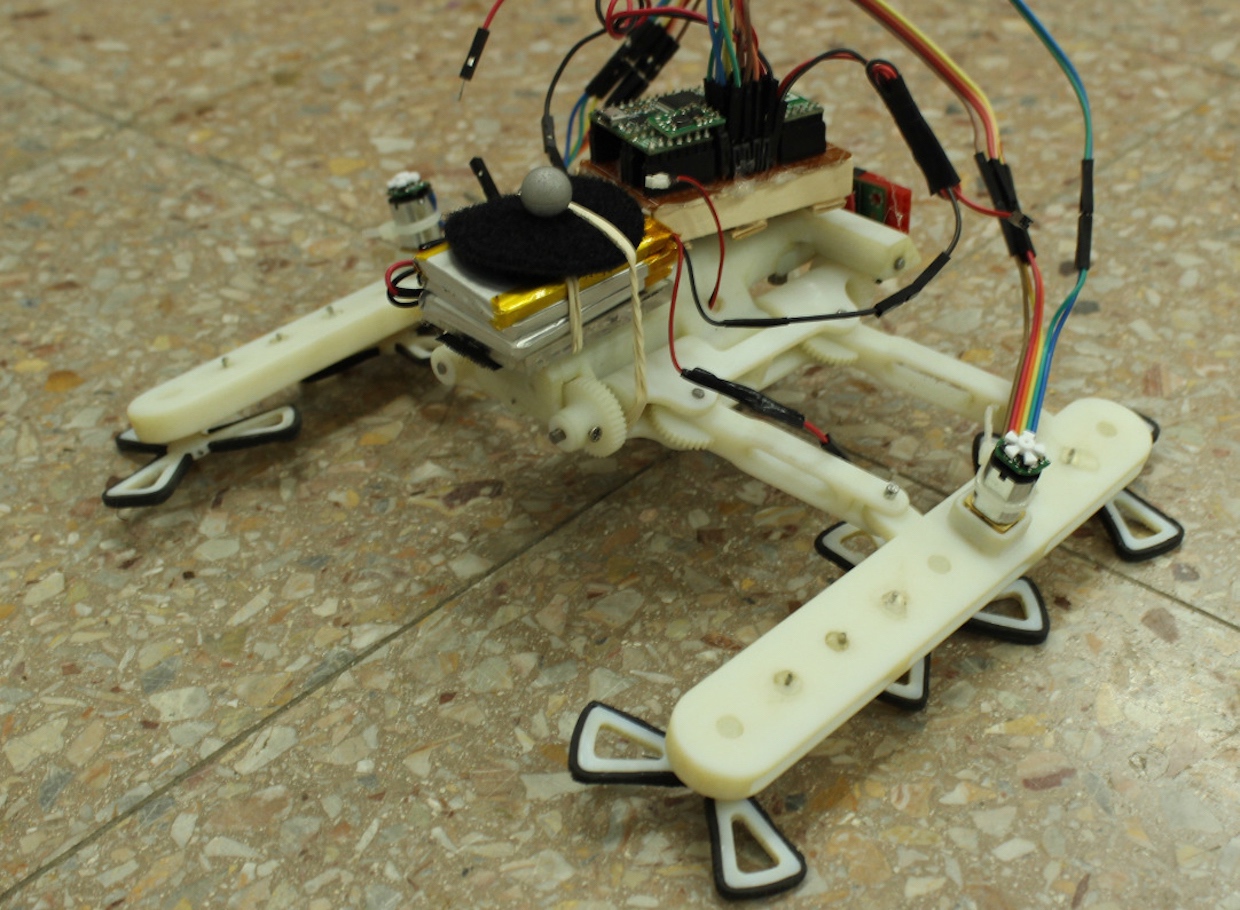
Впечатляет то, как Дэвид Заррук (профессор Университета им. Бен-Гуриона в Негеве) в своих роботах умеет извлечь «тонну» функциональности из абсолютного минимума аппаратных средств. Раньше он демонстрировал «умные» конструкции, такие как управляемый робот, в котором используется только один двигатель, и многоцелевой робот-манипулятор, в котором используется только один привод для активации всех степеней свободы манипулятора.
Впечатляет то, как Дэвид Заррук (профессор Университета им. Бен-Гуриона в Негеве) в своих роботах умеет извлечь «тонну» функциональности из абсолютного минимума аппаратных средств. Раньше он демонстрировал «умные» конструкции, такие как управляемый робот, в котором используется только один двигатель, и многоцелевой робот-манипулятор, в котором используется только один привод для активации всех степеней свободы манипулятора. В 2018 году, на международной конференции IEEE по робототехнике и автоматизации (ICRA) Заррук представил обновленную версию робота-трансформера который первый раз демонстрировался на конференции в 2013 году. Названный Rising STAR (восходящая звезда) или RSTAR, он имеет «растянутую» подвижность колеса-ноги ни и еще одну дополнительную степень свободы. Которая позволяет телу робота двигаться отдельно от ног, меняя центр масс робота, чтобы помочь ему преодолевать препятствия. Эту особенность робота его создатель назвал «растягивающийся» (sprawling). RSTAR - последний в серии растягивающихся роботов, предназначенных для преодоления всех видов препятствий на местности, одновременно минимизируя стоимость перевозки грузов. «Растягивание» в этом контексте относится к ногам робота, которые регулируемо отклоняются под углом внутрь и наружу по отношению к телу. RSTAR обладает дополнительной степенью свободы. Благодаря этому, его тело может изменять свое местоположение относительно ног, изменяя центр масс робота. Это, казалось бы, простое изменение позволяет роботу решать многие новые задачи. Робот может не только преодолевать большие препятствия, не переворачиваясь, но также может подниматься вертикально вверх между двумя близко расположенными стенами и проползать через узкие промежутки.<iframe width="620" height="349" src="https://www.youtube.com/embed/XI_aepVAuxY" frameborder="0" allow="autoplay; encrypted-media" allowfullscreen></iframe> Регулируемый центр масс помогает роботу сохранять более устойчивое положение, и робот может переключаться от более быстрых и эффективных колес к более проходимым колесам- спицам. Максимальная скорость робота составляет около 1 м /с с на твердых плоских поверхностях. Хотя, с другой стороны, его черепашья походка позволяет роботу преодолевать чрезвычайно мягкие или зыбкие поверхности (например, густой ил или песок). На данный момент времени, всё, что мы видим на видео, не является автономным. Хотя похоже, что создатели робота работают на него автономией. Чтобы рассказать о роботе более подробно, Zarrouk ответил на вопросы по электронной почте.Почему была выбрана эта модификация STAR, чтобы превратить её в RSTAR? Мы стремились увеличить возможности STAR преодолевать препятствия. для этого, был добавлен простой механизм с одним двигателем. Мы приняли решение расширить расстояния между колесами до тела. Вопрос заключался в том, следует ли использовать механизм, который бы или изменил положение центра масс в направлении вперед или назад. Механизм расширения, который мы в конечном итоге выбрали, перемещает центр масс в переднем и заднем направлениях, что делает робота еще более динамически реконфигурируемым. В итоге мы обнаружили, что эта интересная функция также может быть использована для повышения стабильности или намеренного переворачивания вверх дном, когда это необходимо. Каковы виды местности, которые RSTAR может преодолеть, а предыдущая версия STAR не могла? Предыдущая версия STAR хорошо проползает под препятствиями и движется по пересеченной местности на высокой скорости. Но, как и для других роботов, возможность его переезда через препятствие ограничена размерами его колес. Он может преодолевать препятствия высотой до 70 процентов диаметра колес. Изменяя высоту и ширину, RSTAR более эффективен в передвижении по «грубой» местности, такой как гравий, камни или трава. RSTAR также может ползти по зыбкой или очень скользкой местности, используя «черепашью походку», не проворачивая колеса. Высота препятствий, которые RSTAR может преодолевать, также значительно больше. Кроме того, перемещая свой центр масс вперёд, RSTAR может преодолевать более крутые уклоны, не переворачиваясь. RSTAR также может подниматься вертикально в трубе. и даже перемещаться горизонтально, нажимая колесами на две близко расположенные стены, при этом не касаясь пола.Каковы потенциальные применения для RSTAR? Семейство роботов STAR очень подходит для проведения поисково-спасательных операций, особенно в неструктурированных средах, таких как разрушенные здания или затопленные районы. В реальной поисковой и спасательной операции робот часто должен последовательно преодолевать множество препятствий разных типов, чтобы достичь своей цели. Мы построили RSTAR, имея в виду, что он должен быть простым, надежным, и чтобы он мог преодолевать множество препятствий без какого-либо внешнего механического вмешательства. RSTAR сочетает в себе несколько возможностей изменения формы, которые позволят ему преодолевать препятствия или пробираться между ними или под ними. Кроме того, RSTAR является относительно быстрым роботом и имеет относительно низкое потребление электроэнергии, что вместе увеличивает рабочий диапазон и время работы.Какими другими способами вы хотели бы улучшить RSTAR или сделать его более универсальным? Есть два основных обновления, которые мы будем применять в роботе RSTAR. Во-первых, сейчас мы используем алгоритмы машинного обучения для обучения RSTAR некоторым простым маневрам, чтобы преодолевать конкретные препятствия. Поэтому, в конечном итоге, RSTAR будет иметь некоторую частичную автономию. Во-вторых, мы рассматриваем возможность увеличения механических возможностей робота, управляя длиной стержней его системы движителей.Не могли бы вы рассказать нам больше о более крупной версии робота, показанного в конце видео? Поскольку размер препятствий, которые может преодолеть робот, ограничен его собственным размером, мы решили построить более крупную версию, которая могла бы преодолевать большие препятствия, а также лестницы. Более крупная версия сможет нести 2 кг полезной нагрузки (датчики и расходные материалы). Его также можно использовать совместно с меньшим роботом STAR или RSTAR. Более крупный робот, несущий меньшую версию, увеличит способность к разведке обоих роботов. Поскольку более крупный робот будет нести меньшего робота по более крупным препятствиям и ближе к месту назначения. А меньший робот сможет пробраться сквозь меньшие трещины или проходы.Впечатляет то, как Дэвид Заррук (профессор Университета им. Бен-Гуриона в Негеве) в своих роботах умеет извлечь «тонну» функциональности из абсолютного минимума аппаратных средств. Раньше он демонстрировал «умные» конструкции, такие как управляемый робот, в котором используется только один двигатель, и многоцелевой робот-манипулятор, в котором используется только один привод для активации всех степеней свободы манипулятора.
В 2018 году, на международной конференции IEEE по робототехнике и автоматизации (ICRA) Заррук представил обновленную версию робота-трансформера который первый раз демонстрировался на конференции в 2013 году. Названный Rising STAR (восходящая звезда) или RSTAR, он имеет «растянутую» подвижность колеса-ноги ни и еще одну дополнительную степень свободы. Которая позволяет телу робота двигаться отдельно от ног, меняя центр масс робота, чтобы помочь ему преодолевать препятствия. Эту особенность робота его создатель назвал «растягивающийся» (sprawling).
RSTAR - последний в серии растягивающихся роботов, предназначенных для преодоления всех видов препятствий на местности, одновременно минимизируя стоимость перевозки грузов. «Растягивание» в этом контексте относится к ногам робота, которые регулируемо отклоняются под углом внутрь и наружу по отношению к телу. RSTAR обладает дополнительной степенью свободы. Благодаря этому, его тело может изменять свое местоположение относительно ног, изменяя центр масс робота. Это, казалось бы, простое изменение позволяет роботу решать многие новые задачи. Робот может не только преодолевать большие препятствия, не переворачиваясь, но также может подниматься вертикально вверх между двумя близко расположенными стенами и проползать через узкие промежутки.
Регулируемый центр масс помогает роботу сохранять более устойчивое положение, и робот может переключаться от более быстрых и эффективных колес к более проходимым колесам- спицам. Максимальная скорость робота составляет около 1 м /с с на твердых плоских поверхностях. Хотя, с другой стороны, его черепашья походка позволяет роботу преодолевать чрезвычайно мягкие или зыбкие поверхности (например, густой ил или песок).
На данный момент времени, всё, что мы видим на видео, не является автономным. Хотя похоже, что создатели робота работают на него автономией. Чтобы рассказать о роботе более подробно, Zarrouk ответил на вопросы по электронной почте.
Почему была выбрана эта модификация STAR, чтобы превратить её в RSTAR?
Мы стремились увеличить возможности STAR преодолевать препятствия. для этого, был добавлен простой механизм с одним двигателем. Мы приняли решение расширить расстояния между колесами до тела. Вопрос заключался в том, следует ли использовать механизм, который бы или изменил положение центра масс в направлении вперед или назад. Механизм расширения, который мы в конечном итоге выбрали, перемещает центр масс в переднем и заднем направлениях, что делает робота еще более динамически реконфигурируемым. В итоге мы обнаружили, что эта интересная функция также может быть использована для повышения стабильности или намеренного переворачивания вверх дном, когда это необходимо.
Каковы виды местности, которые RSTAR может преодолеть, а предыдущая версия STAR не могла?
Предыдущая версия STAR хорошо проползает под препятствиями и движется по пересеченной местности на высокой скорости. Но, как и для других роботов, возможность его переезда через препятствие ограничена размерами его колес. Он может преодолевать препятствия высотой до 70 процентов диаметра колес. Изменяя высоту и ширину, RSTAR более эффективен в передвижении по «грубой» местности, такой как гравий, камни или трава. RSTAR также может ползти по зыбкой или очень скользкой местности, используя «черепашью походку», не проворачивая колеса. Высота препятствий, которые RSTAR может преодолевать, также значительно больше. Кроме того, перемещая свой центр масс вперёд, RSTAR может преодолевать более крутые уклоны, не переворачиваясь. RSTAR также может подниматься вертикально в трубе. и даже перемещаться горизонтально, нажимая колесами на две близко расположенные стены, при этом не касаясь пола.
Каковы потенциальные применения для RSTAR?
Семейство роботов STAR очень подходит для проведения поисково-спасательных операций, особенно в неструктурированных средах, таких как разрушенные здания или затопленные районы. В реальной поисковой и спасательной операции робот часто должен последовательно преодолевать множество препятствий разных типов, чтобы достичь своей цели. Мы построили RSTAR, имея в виду, что он должен быть простым, надежным, и чтобы он мог преодолевать множество препятствий без какого-либо внешнего механического вмешательства. RSTAR сочетает в себе несколько возможностей изменения формы, которые позволят ему преодолевать препятствия или пробираться между ними или под ними. Кроме того, RSTAR является относительно быстрым роботом и имеет относительно низкое потребление электроэнергии, что вместе увеличивает рабочий диапазон и время работы.
Какими другими способами вы хотели бы улучшить RSTAR или сделать его более универсальным?
Есть два основных обновления, которые мы будем применять в роботе RSTAR. Во-первых, сейчас мы используем алгоритмы машинного обучения для обучения RSTAR некоторым простым маневрам, чтобы преодолевать конкретные препятствия. Поэтому, в конечном итоге, RSTAR будет иметь некоторую частичную автономию. Во-вторых, мы рассматриваем возможность увеличения механических возможностей робота, управляя длиной стержней его системы движителей.
Не могли бы вы рассказать нам больше о более крупной версии робота, показанного в конце видео?
Поскольку размер препятствий, которые может преодолеть робот, ограничен его собственным размером, мы решили построить более крупную версию, которая могла бы преодолевать большие препятствия, а также лестницы. Более крупная версия сможет нести 2 кг полезной нагрузки (датчики и расходные материалы). Его также можно использовать совместно с меньшим роботом STAR или RSTAR. Более крупный робот, несущий меньшую версию, увеличит способность к разведке обоих роботов. Поскольку более крупный робот будет нести меньшего робота по более крупным препятствиям и ближе к месту назначения. А меньший робот сможет пробраться сквозь меньшие трещины или проходы.
Впечатляет то, как Дэвид Заррук (профессор Университета им. Бен-Гуриона в Негеве) в своих роботах умеет извлечь «тонну» функциональности из абсолютного минимума аппаратных средств. Раньше он демонстрировал «умные» конструкции, такие как управляемый робот, в котором используется только один двигатель, и многоцелевой робот-манипулятор, в котором используется только один привод для активации всех степеней свободы манипулятора.
В 2018 году, на международной конференции IEEE по робототехнике и автоматизации (ICRA) Заррук представил обновленную версию робота-трансформера который первый раз демонстрировался на конференции в 2013 году. Названный Rising STAR (восходящая звезда) или RSTAR, он имеет «растянутую» подвижность колеса-ноги ни и еще одну дополнительную степень свободы. Которая позволяет телу робота двигаться отдельно от ног, меняя центр масс робота, чтобы помочь ему преодолевать препятствия. Эту особенность робота его создатель назвал «растягивающийся» (sprawling).
RSTAR - последний в серии растягивающихся роботов, предназначенных для преодоления всех видов препятствий на местности, одновременно минимизируя стоимость перевозки грузов. «Растягивание» в этом контексте относится к ногам робота, которые регулируемо отклоняются под углом внутрь и наружу по отношению к телу. RSTAR обладает дополнительной степенью свободы. Благодаря этому, его тело может изменять свое местоположение относительно ног, изменяя центр масс робота. Это, казалось бы, простое изменение позволяет роботу решать многие новые задачи. Робот может не только преодолевать большие препятствия, не переворачиваясь, но также может подниматься вертикально вверх между двумя близко расположенными стенами и проползать через узкие промежутки.
Регулируемый центр масс помогает роботу сохранять более устойчивое положение, и робот может переключаться от более быстрых и эффективных колес к более проходимым колесам- спицам. Максимальная скорость робота составляет около 1 м /с с на твердых плоских поверхностях. Хотя, с другой стороны, его черепашья походка позволяет роботу преодолевать чрезвычайно мягкие или зыбкие поверхности (например, густой ил или песок).
На данный момент времени, всё, что мы видим на видео, не является автономным. Хотя похоже, что создатели робота работают на него автономией. Чтобы рассказать о роботе более подробно, Zarrouk ответил на вопросы по электронной почте.
Почему была выбрана эта модификация STAR, чтобы превратить её в RSTAR?
Мы стремились увеличить возможности STAR преодолевать препятствия. для этого, был добавлен простой механизм с одним двигателем. Мы приняли решение расширить расстояния между колесами до тела. Вопрос заключался в том, следует ли использовать механизм, который бы или изменил положение центра масс в направлении вперед или назад. Механизм расширения, который мы в конечном итоге выбрали, перемещает центр масс в переднем и заднем направлениях, что делает робота еще более динамически реконфигурируемым. В итоге мы обнаружили, что эта интересная функция также может быть использована для повышения стабильности или намеренного переворачивания вверх дном, когда это необходимо.
Каковы виды местности, которые RSTAR может преодолеть, а предыдущая версия STAR не могла?
Предыдущая версия STAR хорошо проползает под препятствиями и движется по пересеченной местности на высокой скорости. Но, как и для других роботов, возможность его переезда через препятствие ограничена размерами его колес. Он может преодолевать препятствия высотой до 70 процентов диаметра колес. Изменяя высоту и ширину, RSTAR более эффективен в передвижении по «грубой» местности, такой как гравий, камни или трава. RSTAR также может ползти по зыбкой или очень скользкой местности, используя «черепашью походку», не проворачивая колеса. Высота препятствий, которые RSTAR может преодолевать, также значительно больше. Кроме того, перемещая свой центр масс вперёд, RSTAR может преодолевать более крутые уклоны, не переворачиваясь. RSTAR также может подниматься вертикально в трубе. и даже перемещаться горизонтально, нажимая колесами на две близко расположенные стены, при этом не касаясь пола.
Каковы потенциальные применения для RSTAR?
Семейство роботов STAR очень подходит для проведения поисково-спасательных операций, особенно в неструктурированных средах, таких как разрушенные здания или затопленные районы. В реальной поисковой и спасательной операции робот часто должен последовательно преодолевать множество препятствий разных типов, чтобы достичь своей цели. Мы построили RSTAR, имея в виду, что он должен быть простым, надежным, и чтобы он мог преодолевать множество препятствий без какого-либо внешнего механического вмешательства. RSTAR сочетает в себе несколько возможностей изменения формы, которые позволят ему преодолевать препятствия или пробираться между ними или под ними. Кроме того, RSTAR является относительно быстрым роботом и имеет относительно низкое потребление электроэнергии, что вместе увеличивает рабочий диапазон и время работы.
Какими другими способами вы хотели бы улучшить RSTAR или сделать его более универсальным?
Есть два основных обновления, которые мы будем применять в роботе RSTAR. Во-первых, сейчас мы используем алгоритмы машинного обучения для обучения RSTAR некоторым простым маневрам, чтобы преодолевать конкретные препятствия. Поэтому, в конечном итоге, RSTAR будет иметь некоторую частичную автономию. Во-вторых, мы рассматриваем возможность увеличения механических возможностей робота, управляя длиной стержней его системы движителей.
Не могли бы вы рассказать нам больше о более крупной версии робота, показанного в конце видео?
Поскольку размер препятствий, которые может преодолеть робот, ограничен его собственным размером, мы решили построить более крупную версию, которая могла бы преодолевать большие препятствия, а также лестницы. Более крупная версия сможет нести 2 кг полезной нагрузки (датчики и расходные материалы). Его также можно использовать совместно с меньшим роботом STAR или RSTAR. Более крупный робот, несущий меньшую версию, увеличит способность к разведке обоих роботов. Поскольку более крупный робот будет нести меньшего робота по более крупным препятствиям и ближе к месту назначения. А меньший робот сможет пробраться сквозь меньшие трещины или проходы.
Впечатляет то, как Дэвид Заррук (профессор Университета им. Бен-Гуриона в Негеве) в своих роботах умеет извлечь «тонну» функциональности из абсолютного минимума аппаратных средств. Раньше он демонстрировал «умные» конструкции, такие как управляемый робот, в котором используется только один двигатель, и многоцелевой робот-манипулятор, в котором используется только один привод для активации всех степеней свободы манипуля.
В 2018 году, на международной конференции IEEE по робототехнике и автоматизации (ICRA) Заррук представил обновленную версию робота-трансформера который первый раз демонстрировался на конференции в 2013 году. Названный Rising STAR (восходящая звезда) или RSTAR, он имеет «растянутую» подвижность колеса-ноги ни и еще одну дополнительную степень свободы. Которая позволяет телу робота двигаться отдельно от ног, меняя центр масс робота, чтобы помочь ему преодолевать препятствия. Эту особенность робота его создатель назвал «растягивающийся» (sprawling).
RSTAR - последний в серии растягивающихся роботов, предназначенных для преодоления всех видов препятствий на местности, одновременно минимизируя стоимость перевозки грузов. «Растягивание» в этом контексте относится к ногам робота, которые регулируемо отклоняются под углом внутрь и наружу по отношению к телу. RSTAR обладает дополнительной степенью свободы. Благодаря этому, его тело может изменять свое местоположение относительно ног, изменяя центр масс робота. Это, казалось бы, простое изменение позволяет роботу решать многие новые задачи. Робот может не только преодолевать большие препятствия, не переворачиваясь, но также может подниматься вертикально вверх между двумя близко расположенными стенами и проползать через узкие промежутки.
Регулируемый центр масс помогает роботу сохранять более устойчивое положение, и робот может переключаться от более быстрых и эффективных колес к более проходимым колесам- спицам. Максимальная скорость робота составляет около 1 м /с с на твердых плоских поверхностях. Хотя, с другой стороны, его черепашья походка позволяет роботу преодолевать чрезвычайно мягкие или зыбкие поверхности (например, густой ил или песок).
На данный момент времени, всё, что мы видим на видео, не является автономным. Хотя похоже, что создатели робота работают на него автономией. Чтобы рассказать о роботе более подробно, Zarrouk ответил на вопросы по электронной почте.
Почему была выбрана эта модификация STAR, чтобы превратить её в RSTAR?
Мы стремились увеличить возможности STAR преодолевать препятствия. для этого, был добавлен простой механизм с одним двигателем. Мы приняли решение расширить расстояния между колесами до тела. Вопрос заключался в том, следует ли использовать механизм, который бы или изменил положение центра масс в направлении вперед или назад. Механизм расширения, который мы в конечном итоге выбрали, перемещает центр масс в переднем и заднем направлениях, что делает робота еще более динамически реконфигурируемым. В итоге мы обнаружили, что эта интересная функция также может быть использована для повышения стабильности или намеренного переворачивания вверх дном, когда это необходимо.
Каковы виды местности, которые RSTAR может преодолеть, а предыдущая версия STAR не могла?
Предыдущая версия STAR хорошо проползает под препятствиями и движется по пересеченной местности на высокой скорости. Но, как и для других роботов, возможность его переезда через препятствие ограничена размерами его колес. Он может преодолевать препятствия высотой до 70 процентов диаметра колес. Изменяя высоту и ширину, RSTAR более эффективен в передвижении по «грубой» местности, такой как гравий, камни или трава. RSTAR также может ползти по зыбкой или очень скользкой местности, используя «черепашью походку», не проворачивая колеса. Высота препятствий, которые RSTAR может преодолевать, также значительно больше. Кроме того, перемещая свой центр масс вперёд, RSTAR может преодолевать более крутые уклоны, не переворачиваясь. RSTAR также может подниматься вертикально в трубе. и даже перемещаться горизонтально, нажимая колесами на две близко расположенные стены, при этом не касаясь пола.
Каковы потенциальные применения для RSTAR?
Семейство роботов STAR очень подходит для проведения поисково-спасательных операций, особенно в неструктурированных средах, таких как разрушенные здания или затопленные районы. В реальной поисковой и спасательной операции робот часто должен последовательно преодолевать множество препятствий разных типов, чтобы достичь своей цели. Мы построили RSTAR, имея в виду, что он должен быть простым, надежным, и чтобы он мог преодолевать множество препятствий без какого-либо внешнего механического вмешательства. RSTAR сочетает в себе несколько возможностей изменения формы, которые позволят ему преодолевать препятствия или пробираться между ними или под ними. Кроме того, RSTAR является относительно быстрым роботом и имеет относительно низкое потребление электроэнергии, что вместе увеличивает рабочий диапазон и время работы.
Какими другими способами вы хотели бы улучшить RSTAR или сделать его более универсальным?
Есть два основных обновления, которые мы будем применять в роботе RSTAR. Во-первых, сейчас мы используем алгоритмы машинного обучения для обучения RSTAR некоторым простым маневрам, чтобы преодолевать конкретные препятствия. Поэтому, в конечном итоге, RSTAR будет иметь некоторую частичную автономию. Во-вторых, мы рассматриваем возможность увеличения механических возможностей робота, управляя длиной стержней его системы движителей.
Не могли бы вы рассказать нам больше о более крупной версии робота, показанного в конце видео?
Поскольку размер препятствий, которые может преодолеть робот, ограничен его собственным размером, мы решили построить более крупную версию, которая могла бы преодолевать большие препятствия, а также лестницы. Более крупная версия сможет нести 2 кг полезной нагрузки (датчики и расходные материалы). Его также можно использовать совместно с меньшим роботом STAR или RSTAR. Более крупный робот, несущий меньшую версию, увеличит способность к разведке обоих роботов. Поскольку более крупный робот будет нести меньшего робота по более крупным препятствиям и ближе к месту назначения. А меньший робот сможет пробраться сквозь меньшие трещины или проходы.
Впечатляет то, как Дэвид Заррук (профессор Университета им. Бен-Гуриона в Негеве) в своих роботах умеет извлечь «тонну» функциональности из абсолютного минимума аппаратных средств. Раньше он демонстрировал «умные» конструкции, такие как управляемый робот, в котором используется только один двигатель, и многоцелевой робот-манипулятор, в котором используется только один привод для активации всех степеней свободы манипулятора.
В 2018 году, на международной конференции IEEE по робототехнике и автоматизации (ICRA) Заррук представил обновленную версию робота-трансформера который первый раз демонстрировался на конференции в 2013 году. Названный Rising STAR (восходящая звезда) или RSTAR, он имеет «растянутую» подвижность колеса-ноги ни и еще одну дополнительную степень свободы. Которая позволяет телу робота двигаться отдельно от ног, меняя центр масс робота, чтобы помочь ему преодолевать препятствия. Эту особенность робота его создатель назвал «растягивающийся» (sprawling).
RSTAR - последний в серии растягивающихся роботов, предназначенных для преодоления всех видов препятствий на местности, одновременно минимизируя стоимость перевозки грузов. «Растягивание» в этом контексте относится к ногам робота, которые регулируемо отклоняются под углом внутрь и наружу по отношению к телу. RSTAR обладает дополнительной степенью свободы. Благодаря этому, его тело может изменять свое местоположение относительно ног, изменяя центр масс робота. Это, казалось бы, простое изменение позволяет роботу решать многие новые задачи. Робот может не только преодолевать большие препятствия, не переворачиваясь, но также может подниматься вертикально вверх между двумя близко расположенными стенами и проползать через узкие промежутки.
Регулируемый центр масс помогает роботу сохранять более устойчивое положение, и робот может переключаться от более быстрых и эффективных колес к более проходимым колесам- спицам. Максимальная скорость робота составляет около 1 м /с с на твердых плоских поверхностях. Хотя, с другой стороны, его черепашья походка позволяет роботу преодолевать чрезвычайно мягкие или зыбкие поверхности (например, густой ил или песок).
На данный момент времени, всё, что мы видим на видео, не является автономным. Хотя похоже, что создатели робота работают на него автономией. Чтобы рассказать о роботе более подробно, Zarrouk ответил на вопросы по электронной почте.
Почему была выбрана эта модификация STAR, чтобы превратить её в RSTAR?
Мы стремились увеличить возможности STAR преодолевать препятствия. для этого, был добавлен простой механизм с одним двигателем. Мы приняли решение расширить расстояния между колесами до тела. Вопрос заключался в том, следует ли использовать механизм, который бы или изменил положение центра масс в направлении вперед или назад. Механизм расширения, который мы в конечном итоге выбрали, перемещает центр масс в переднем и заднем направлениях, что делает робота еще более динамически реконфигурируемым. В итоге мы обнаружили, что эта интересная функция также может быть использована для повышения стабильности или намеренного переворачивания вверх дном, когда это необходимо.
Каковы виды местности, которые RSTAR может преодолеть, а предыдущая версия STAR не могла?
Предыдущая версия STAR хорошо проползает под препятствиями и движется по пересеченной местности на высокой скорости. Но, как и для других роботов, возможность его переезда через препятствие ограничена размерами его колес. Он может преодолевать препятствия высотой до 70 процентов диаметра колес. Изменяя высоту и ширину, RSTAR более эффективен в передвижении по «грубой» местности, такой как гравий, камни или трава. RSTAR также может ползти по зыбкой или очень скользкой местности, используя «черепашью походку», не проворачивая колеса. Высота препятствий, которые RSTAR может преодолевать, также значительно больше. Кроме того, перемещая свой центр масс вперёд, RSTAR может преодолевать более крутые уклоны, не переворачиваясь. RSTAR также может подниматься вертикально в трубе. и даже перемещаться горизонтально, нажимая колесами на две близко расположенные стены, при этом не касаясь пола.
Каковы потенциальные применения для RSTAR?
Семейство роботов STAR очень подходит для проведения поисково-спасательных операций, особенно в неструктурированных средах, таких как разрушенные здания или затопленные районы. В реальной поисковой и спасательной операции робот часто должен последовательно преодолевать множество препятствий разных типов, чтобы достичь своей цели. Мы построили RSTAR, имея в виду, что он должен быть простым, надежным, и чтобы он мог преодолевать множество препятствий без какого-либо внешнего механического вмешательства. RSTAR сочетает в себе несколько возможностей изменения формы, которые позволят ему преодолевать препятствия или пробираться между ними или под ними. Кроме того, RSTAR является относительно быстрым роботом и имеет относительно низкое потребление электроэнергии, что вместе увеличивает рабочий диапазон и время работы.
Какими другими способами вы хотели бы улучшить RSTAR или сделать его более универсальным?
Есть два основных обновления, которые мы будем применять в роботе RSTAR. Во-первых, сейчас мы используем алгоритмы машинного обучения для обучения RSTAR некоторым простым маневрам, чтобы преодолевать конкретные препятствия. Поэтому, в конечном итоге, RSTAR будет иметь некоторую частичную автономию. Во-вторых, мы рассматриваем возможность увеличения механических возможностей робота, управляя длиной стержней его системы движителей.
Не могли бы вы рассказать нам больше о более крупной версии робота, показанного в конце видео?
Поскольку размер препятствий, которые может преодолеть робот, ограничен его собственным размером, мы решили построить более крупную версию, которая могла бы преодолевать большие препятствия, а также лестницы. Более крупная версия сможет нести 2 кг полезной нагрузки (датчики и расходные материалы). Его также можно использовать совместно с меньшим роботом STAR или RSTAR. Более крупный робот, несущий меньшую версию, увеличит способность к разведке обоих роботов. Поскольку более крупный робот будет нести меньшего робота по более крупным препятствиям и ближе к месту назначения. А меньший робот сможет пробраться сквозь меньшие трещины или проходы.
Комментарии:
 SabJO|..2021-04-07 08:20:14|Quality products and drugs only here https://bit.ly/3wlPWWxQuality medical products at a low cost. Worldwide delivery
SabJO|..2021-04-07 08:20:14|Quality products and drugs only here https://bit.ly/3wlPWWxQuality medical products at a low cost. Worldwide delivery
https://bit.ly/3oZOKnO- HarryewhomeCT|..2021-05-11 14:40:55|Обмен wmzкакие-то они уж слишком милые...
Сегодня, благодаря webmoney можно брать кредиты, вывести webmoney совершать обменные денежные дела с невысоким процентом. g-кошелек обеспечивается золотом. Иными словами 1 wmg в системе webmoney эквивалентен 1 грамму золота. Титульные знаки webmoney самое прекрасная возможность платежа для расчетов в Интернете и очень широко распространено в русскоязычном сегменте возможностях вашего интернета и не только. r-кошелек, он же «рублевый кошелек webmoney», «wmr» или «типа r» . Далее, чуть скромнее, сайт выдаст вам вариант конвертирования. Эквивалент украинских гривен. Номер u-кошелька сформировано из буквы «u» и 12 цифр. Воспользовавшись данным способом забора денег, клиент обязан заплатить комиссию на сумму 3-х % от выводимой суммы. - LauranLopWP|..2021-05-11 15:09:42|Vk coffeeЯ считаю, что Вы ошибаетесь. Пишите мне в PM, поговорим.
как заказчик поняли, функционал скачать в кофе практически безграничен И, безусловно, такого не отыщите ни в одной программе-клиенте для ВКонтакте. вы когда-то размышляли обо всем, что функциональные возможности официального приложения ВКонтакте можно сделать намного эффективнее и комфортней. Недавно нашел вк какао и остановился на родной программе, она реально лучшая. Также Потребитель имеет возможность воспользоваться функцией, которая устанавливает статус оффлайн, а жертва находится онлайн. когда пользователь будет заходить из этой ПО, в социальной сети будет отображаться не реальное время подключения, а та, когда клиент посещал доступ к Интернету без этом функционале. - JerrieErrowZG|..2021-05-11 15:39:29|ремонт пластиковых оконЖаль, что сейчас не могу высказаться - вынужден уйти. Освобожусь - обязательно выскажу своё мнение по этому вопросу.
Обратите внимание, сетки на окна от аллерги что расценки на восстановление указаны примерные. Чаще всего мы не рекомендуем осуществлять ремонт окон своими силами: не подозревая тонкостей оконных систем очень легко повредить важные промышленные устройства а также усугубить проблемы. Расширенная гарантия предоставляется за отдельную плату. любые материалы, что вам нужно сделать - позвонить нам. идеально подходит, компактна и эстетична. 3. Мастер приезжает к вам и заключает договор, После чего осуществляет выполнению работ. когда речь идет о нужно, специалист прибудет в срочном режиме прямо в день подачи запроса. точную цену Работы разрешается оценить только после осмотра. - paynCFX|..2021-05-15 08:10:12|Услуги таможенного оформленияЧто-либо доставить из Китая и стран Азии без проволочек на таможне не возможно. Это не конвейер, по которому всё движется легко и равномерно. Фактический контроль на границе постоянно требует присутствия представителя компании импортёра для того что бы проконтролировать процесс таможенного оформления . Транспортно-логистическая компания Азия-Трейдинг окажет Вам всю поддержку по контролю проведения всех таможенных процедур в зоне действия Дальневосточной таможни.
- paynCFX|..2021-05-17 17:00:30|Авто из Японии в РоссиюТЛК Азия-Трейдинг - приобретет под заказ любой понравившийся Вам автомобиль с аукционов Японии
- paynCFX|..2021-05-22 05:54:56|Купить авто в Японии
- gamepinupcasinoTI|..2021-05-23 21:15:14|Pin Up CasinoИгровые автоматы Пин Ап Казино имеют официальную лицензию и стабильно выплачивают игрокам их выигрыши!
- paynCFX|..2021-06-11 22:29:54|Авто из Японии в НаходкеАвтомобили, авторазбор, спецтехника, мототехника из Японии, без пробега по РФ. Быстрая доставка и низкие цены на таможенное оформление физ.лиц и юр.лиц. Тел 79910690696 WhatsApp
- ValeryEaSA|..2021-08-02 21:30:05|Очень полезный блог для мужчин и женщин любого возроста - aboutsexblog.ruПравильный секс - ошибки, совееты и многое другое на сайте aboutsexblog.ru
Дама имеет полное право заниматься любовью, с кем хочет и сколько хочет. Никто не должен ее осуждать. Некоторым мужчинампроще от злости назвать женщину шлюхой, чем подумать над тем, почему при прочих равных девушка выбирает не его.
В этом блоге вы найдете стати на такую тему как " девушке больно во время секса " и на многие другие интимные темы которые не принято затрагивать!
aboutsexblog.ru это блог в котором расскажут что такое секс, какие бывают трудности в интимной жизни пар и не только и научат решать избавляться от этих проблем. Ваше стремление себя обезопасить — самое правильное, вы защищаете свое здоровье и будущее. Так что не бойтесь ничего, оберегайте свое право заниматься сексом для удовольствия и без последствий. - ValeryEaSA|..2021-08-03 11:40:38|Очень полезный блог для мужчин и женщин любого возроста - aboutsexblog.ruПравильный секс - ошибки, совееты и многое другое на сайте aboutsexblog.ru
Женщина обладает полным правом заниматься сексом, с кем хочет и когад хочет. Никому до этого не должно быть дела. Некоторым парнямпроще от злобы назвать женщину шлюхой, чем подумать над тем, почему при прочих равных она выбирает не его.
В этом блоге вы найдете стати на такую тему как " больно входит " и на многие другие интимные темы которые не принято затрагивать!
aboutsexblog.ru это блог в котором расскажут что такое секс, какие бывают незадачи в постели у пар и не только и научат решать с легостью их. Ваше стремление себя обезопасить — самое правильное, вы защищаете свое здоровье и будущее. Так что не бойтесь ничего, оберегайте свое право заниматься сексом для удовольствия и без последствий. - Оксана Шарикова|..2021-10-30 17:23:44|Интересно
- IsaacKizST|..2022-01-10 12:33:47|базы для хрумера для досок объявленийбаза для профилей для хрумера
Вы занимаетесь продвижением сайтов? Тогда вам к нам. Наша группа в телеграмме.У нас вы можете выбрать любую нужную для вашей работы базу для прогонов Xrumer и GSA, allsubmitter по разной ценовой категории.купить базы для хрумера
купить базы для хрумера - loveawake.ruZF|..2022-07-31 22:08:51|Are you 18? Come in and don't be shy!Welcome to the world of adult Dating loveawake.ru
- GregoryNaGNN|..2023-11-21 21:02:22|tuchjwrvhttp://tuchkas.ru/




Рубрикатор
- Public Relations(46)
- Бизнес(216)
- Биология(296)
- Головоломки(58)
- Детективные задачи(42)
- Достойный ответ(82)
- Искусство(125)
- История(219)
- Компьютерные игры (2)
- Криминал(25)
- Лингвистика(7)
- Логика(53)
- Математика(9)
- Медицина(23)
- Отдых(8)
- Политика(29)
- Реклама(28)
- Сказочные задачи(52)
- Социальные задачи(340)
- Спорт(37)
- Техника(164)
- Фантастика(4)
- Физика(175)
- Химия(99)
- Экология(30)
Подписка на рассылку
Реклама:
© Виктор Тимохов, 2000–2024. Любое сообщение является мнением лиц, их написавших. За достоверность информации, содержащейся в сообщениях, редакция ответственности не несет. Редакция оставляет за собой право на внесение изменений в поступающие сообщения, не искажающие их смысл, право в отказе публикаций сообщений без объяснения причин, а также право не предоставлять справочную информацию.
Создание сайта - Aplex, 2012

Создание сайта - Aplex, 2012